
Matching the Optimal Denoiser in Point Cloud Diffusion with (Improved) Rotational Alignment
Authors
Ameya Daigavane, YuQing Xie, Bodhi P. Vani, Saeed Saremi, Joseph Kleinhenz, Tess Smidt
Abstract
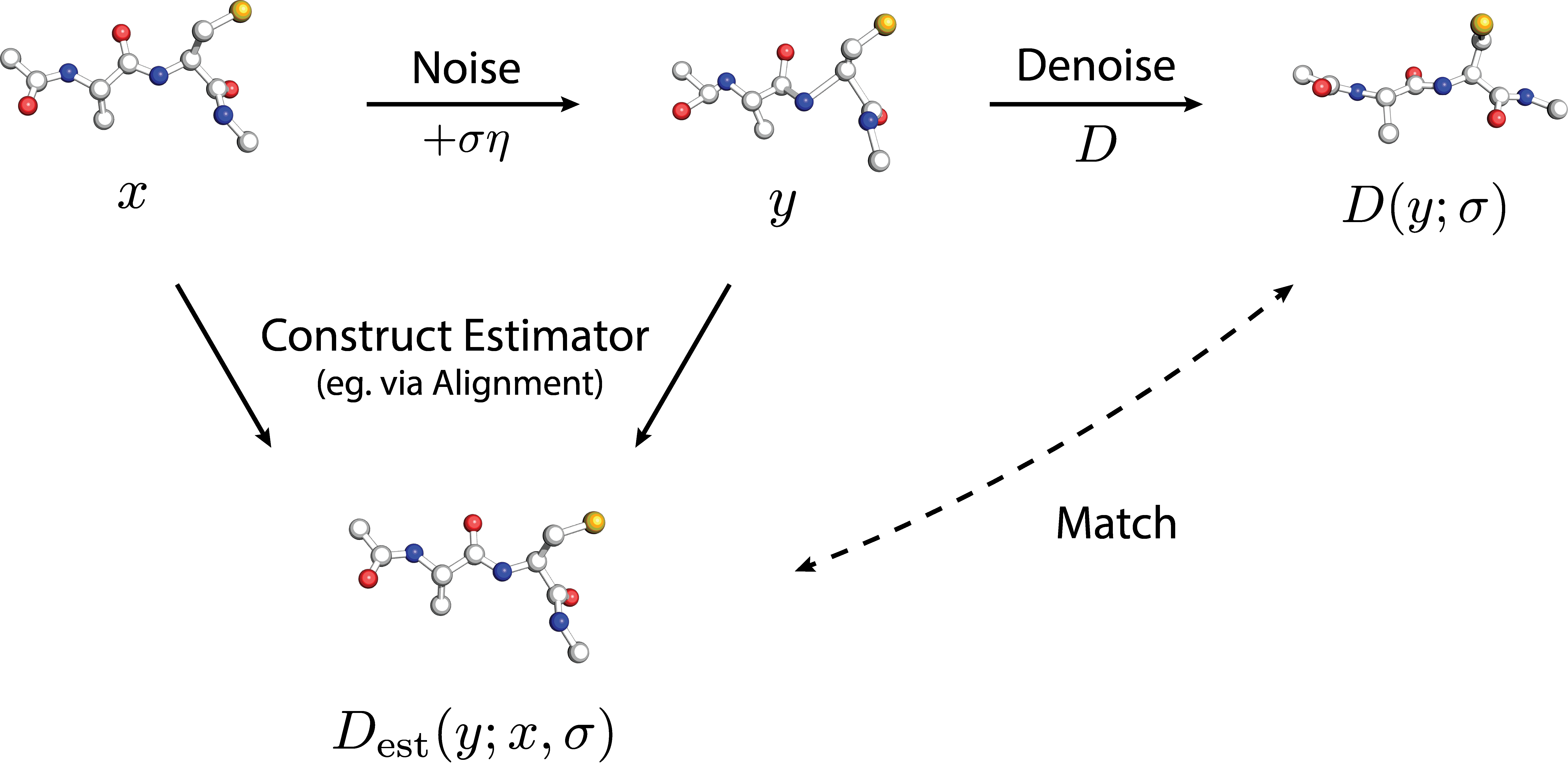
Diffusion models are a popular class of generative models trained to reverse a noising process starting from a target data distribution. Training a diffusion model consists of learning how to denoise noisy samples at different noise levels. When training diffusion models for point clouds such as molecules and proteins, there is often no canonical orientation that can be assigned. To capture this symmetry, the true data samples are often augmented by transforming them with random rotations sampled uniformly over $SO(3)$. Then, the denoised predictions are often rotationally aligned via the Kabsch-Umeyama algorithm to the ground truth samples before computing the loss. However, the effect of this alignment step has not been well studied. Here, we show that the optimal denoiser can be expressed in terms of a matrix Fisher distribution over $SO(3)$. Alignment corresponds to sampling the mode of this distribution, and turns out to be the zeroth order approximation for small noise levels, explaining its effectiveness. We build on this perspective to derive better approximators to the optimal denoiser in the limit of small noise. Our experiments highlight that alignment is often a `good enough' approximation for the noise levels that matter most for training diffusion models.
Concepts
The Big Picture
Imagine you’re trying to teach a computer to generate realistic 3D models of molecules. You show it a caffeine molecule, then a rotated caffeine molecule, then another rotation. The molecule is the same, but it looks different from every angle. The AI needs to understand that these are all the same thing. Getting AI to treat every rotation of an object as equally valid is a core challenge in generating molecular structures, protein conformations, and any 3D data represented as point clouds.
Diffusion models have become the go-to tool for generating such structures. They work by learning to “un-blur” noisy data, starting from chaos and progressively denoising until a realistic structure emerges. But when your data has no preferred orientation in 3D space, you run into a problem: how do you train the model to denoise correctly when any rotation of the answer is equally valid?
The standard fix has been surprisingly simple: rotate your training data randomly, then align the model’s predictions back to the original orientation before measuring the error. Practically every major molecular generation system uses this trick. But until now, nobody had proven why it works, or whether something better was possible. A team from MIT and Genentech has now answered both questions.
Key Insight: The standard alignment trick in point cloud diffusion is mathematically equivalent to the simplest possible approximation of the theoretically perfect denoising step, and the researchers have derived provably better approximations.
How It Works
Two key players make the story work.
The first is the Kabsch-Umeyama algorithm, a classical method for finding the best rotation that aligns two sets of 3D points. When training a diffusion model on molecules, practitioners use this to rotate the model’s prediction so it lines up as closely as possible with the ground-truth structure before computing the error. It’s like grading a student’s answer by first rotating it to match the answer key.
The second is the matrix Fisher distribution, a probability distribution over rotations in 3D space. Think of it like a bell curve, but instead of describing how likely different numbers are, it describes how likely different orientations are. The more concentrated the distribution, the more confidently you can say which rotation is correct.
The paper’s central result connects these two. The optimal denoiser, the theoretically perfect prediction at any given noise level, can be written as an average over the matrix Fisher distribution. Given a noisy point cloud, the ideal denoiser asks: “What rotation would most likely have produced this noisy observation?” It then averages over all plausible rotations, weighted by their probability.
So where does alignment fit in?
- When you apply Kabsch-Umeyama to align a prediction to the ground truth, you’re picking the single most likely rotation (the peak of the Fisher distribution).
- This is mathematically equivalent to a zeroth-order Laplace approximation: replacing the full average over all rotations with just the value at the peak.
- At high noise levels, many rotations are plausible and this approximation is crude. At low noise levels, the distribution becomes sharply peaked and the peak captures nearly everything.
This explains why alignment works at all. As noise decreases during denoising, the optimal rotation becomes more concentrated, and simple alignment becomes an increasingly accurate approximation of the true optimal answer.
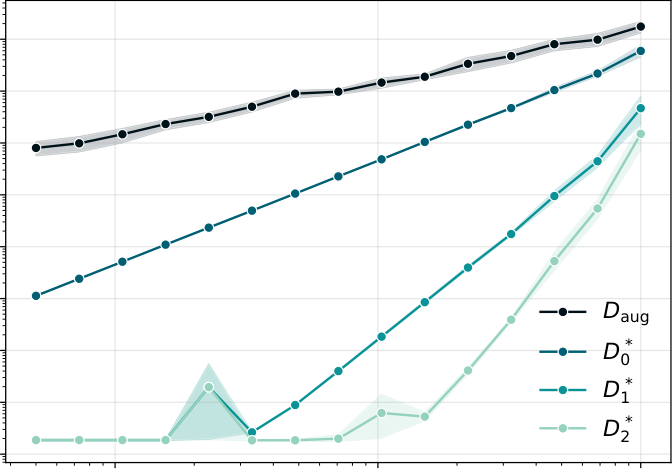
The team went further, using Laplace’s method (a classical technique for approximating integrals by expanding around their peaks) to derive correction terms beyond the zeroth-order approximation. Higher-order estimators capture the spread of the Fisher distribution around its peak, accounting for the range of plausible rotations rather than just the most likely one. The added computational cost is negligible: the correction terms are computed analytically, not through Monte Carlo sampling.
In experiments, the corrected estimators showed reduced bias compared to plain alignment, especially at higher noise levels. But there’s a practical twist: for the noise levels that dominate typical training loss, standard alignment is already quite accurate. The low-noise regime, where improved estimators matter most in theory, is also where plain alignment barely makes errors anyway.
Why It Matters
On the practical side, this gives molecular AI researchers a principled understanding of a technique they’ve been using somewhat blindly. Tools like AlphaFold 3 and molecular generation systems at Genentech use variants of rotational alignment during training. Knowing why it works, and precisely when it might fail, lets researchers make informed architectural decisions rather than relying on empirical folklore.
The theoretical payoff is just as significant. Connecting alignment to the matrix Fisher distribution creates a new mathematical vocabulary for reasoning about symmetry in generative models. The framework isn’t limited to Kabsch-Umeyama: it applies to any setting where data lacks a canonical orientation. As AI-driven drug discovery, materials science, and structural biology tackle harder problems, these theoretical foundations will carry more weight.
Bottom Line: Standard rotational alignment in point cloud diffusion is the zeroth-order approximation to the provably optimal denoiser. The researchers proved it, derived better approximations, and showed that for most practical training scenarios, the old trick works just fine.
IAIFI Research Highlights
This work connects the theory of distributions over Lie groups like SO(3) with modern deep learning, providing rigorous foundations for a widely-used but poorly-understood training technique in molecular AI.
The paper provides the first theoretical proof that rotational alignment in point cloud diffusion training corresponds to a zeroth-order approximation of the optimal denoiser, and derives provably better estimators via Laplace's method at no added computational cost.
By clarifying how symmetry constraints should be handled during diffusion model training, this work directly improves AI tools for predicting molecular and protein structures, central to understanding the fundamental interactions governing matter.
Future work may extend these results to higher noise regimes and other physical symmetry groups. The preprint is available at [arXiv:2510.03335](https://arxiv.org/abs/2510.03335) (Daigavane, Xie, Vani, Saremi, Kleinhenz, Smidt, 2025).
Original Paper Details
Matching the Optimal Denoiser in Point Cloud Diffusion with (Improved) Rotational Alignment
2510.03335
["Ameya Daigavane", "YuQing Xie", "Bodhi P. Vani", "Saeed Saremi", "Joseph Kleinhenz", "Tess Smidt"]
Diffusion models are a popular class of generative models trained to reverse a noising process starting from a target data distribution. Training a diffusion model consists of learning how to denoise noisy samples at different noise levels. When training diffusion models for point clouds such as molecules and proteins, there is often no canonical orientation that can be assigned. To capture this symmetry, the true data samples are often augmented by transforming them with random rotations sampled uniformly over $SO(3)$. Then, the denoised predictions are often rotationally aligned via the Kabsch-Umeyama algorithm to the ground truth samples before computing the loss. However, the effect of this alignment step has not been well studied. Here, we show that the optimal denoiser can be expressed in terms of a matrix Fisher distribution over $SO(3)$. Alignment corresponds to sampling the mode of this distribution, and turns out to be the zeroth order approximation for small noise levels, explaining its effectiveness. We build on this perspective to derive better approximators to the optimal denoiser in the limit of small noise. Our experiments highlight that alignment is often a `good enough' approximation for the noise levels that matter most for training diffusion models.