
Unsupervised Semantic Segmentation by Distilling Feature Correspondences
Authors
Mark Hamilton, Zhoutong Zhang, Bharath Hariharan, Noah Snavely, William T. Freeman
Abstract
Unsupervised semantic segmentation aims to discover and localize semantically meaningful categories within image corpora without any form of annotation. To solve this task, algorithms must produce features for every pixel that are both semantically meaningful and compact enough to form distinct clusters. Unlike previous works which achieve this with a single end-to-end framework, we propose to separate feature learning from cluster compactification. Empirically, we show that current unsupervised feature learning frameworks already generate dense features whose correlations are semantically consistent. This observation motivates us to design STEGO ($\textbf{S}$elf-supervised $\textbf{T}$ransformer with $\textbf{E}$nergy-based $\textbf{G}$raph $\textbf{O}$ptimization), a novel framework that distills unsupervised features into high-quality discrete semantic labels. At the core of STEGO is a novel contrastive loss function that encourages features to form compact clusters while preserving their relationships across the corpora. STEGO yields a significant improvement over the prior state of the art, on both the CocoStuff ($\textbf{+14 mIoU}$) and Cityscapes ($\textbf{+9 mIoU}$) semantic segmentation challenges.
Concepts
The Big Picture
Imagine hiring someone to sort thousands of family photos into albums, but they’ve never met your family, seen your home, or been told what a “birthday” or “vacation” even means. They must figure out, purely from patterns in the images, that certain clusters of pixels always go together: sky belongs with sky, faces cluster with faces, grass stays with grass. That’s what unsupervised semantic segmentation asks a computer to do: dividing an image into meaningful regions and labeling each one, without any examples of what the labels should be. Machines have been bad at it for a long time.
The problem has real stakes. Annotating a single image for semantic segmentation can take over 100 times longer than simply classifying it. In specialized domains like medicine, biology, or astrophysics, the “correct” labels may not even exist in advance. Experts are still arguing about the right categories. A system that discovers meaningful visual categories on its own would change the game.
A team from MIT, Cornell, and Google has now built exactly that. Their system, STEGO, dramatically outperforms previous approaches to unsupervised segmentation, not by constructing a more complex end-to-end model, but by making a simple conceptual move: separating the job of understanding images from the job of labeling them.
Key Insight: Modern self-supervised visual features already “know” which pixels belong together. They just need a targeted distillation step to sharpen that knowledge into crisp, discrete segment labels.
How It Works
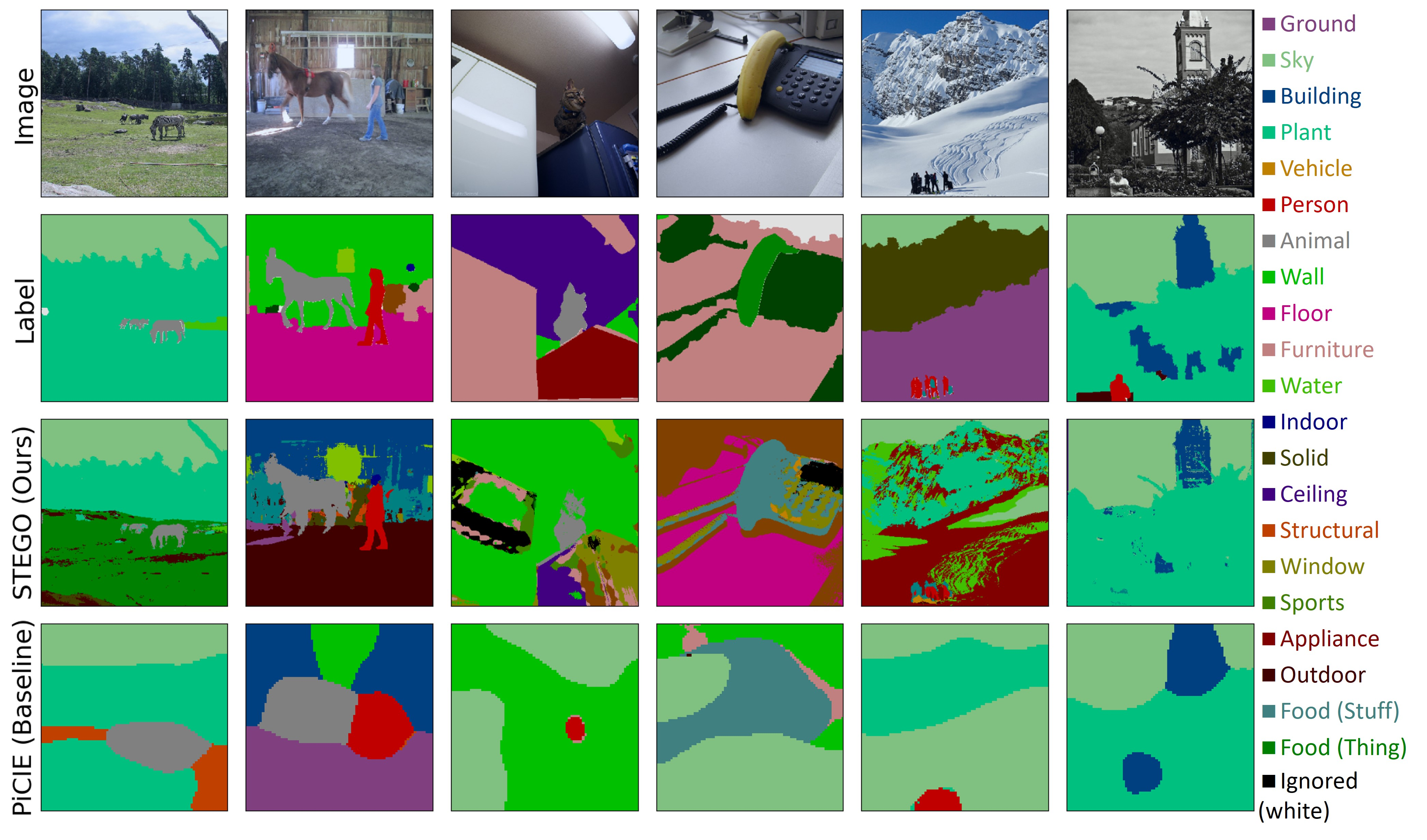
The central observation driving STEGO is almost embarrassingly simple. Recent self-supervised learning frameworks (systems that learn from raw image data without human-provided labels, by finding internal patterns) produce a compact numerical descriptor for every small patch in an image. When the researchers examined the correlations between these descriptors, the patterns were already semantically meaningful: pixels belonging to “sky” correlated strongly with other sky pixels, and “person” features clustered with “person” features, even across entirely different images.
The backbone behind STEGO is DINO, a Vision Transformer (ViT) trained without labels using self-distillation. A ViT processes an image as a grid of tiles and learns relationships between them, in much the same way a language model processes sequences of words.
So the heavy lifting of semantic understanding is already done. The remaining challenge is cluster compactification: taking soft, continuous feature correlations and sharpening them into the hard, discrete assignments that segmentation requires. Previous methods tried to do both tasks at once in a single end-to-end framework, forcing awkward tradeoffs. STEGO does them in sequence.
The pipeline has two stages:
-
Feature extraction: A frozen DINO backbone (meaning its weights are locked and not further adjusted) generates one rich semantic descriptor per image patch. These descriptors are semantically aware but fuzzy.
-
Distillation via contrastive loss: A small network trains on top of those frozen features using a novel energy-based graph optimization loss. For any two images, the system identifies corresponding patches (pairs the pretrained features already consider similar) and trains the segmentation head to assign them consistent cluster labels. The loss preserves the relational structure of the original feature space, which prevents all pixels from collapsing into one giant blob.
The contrastive objective works by comparing pairs of patches and asking “should these belong to the same group?” It samples three types of positive correspondences: patches within the same image that are already similar (self-correspondences), patches from a nearest-neighbor image in the dataset (cross-image correspondences), and random spatial samples used as a regularizer. Each pairing nudges the learned labels toward consistency across the dataset. No human-defined category system is consulted at any point.
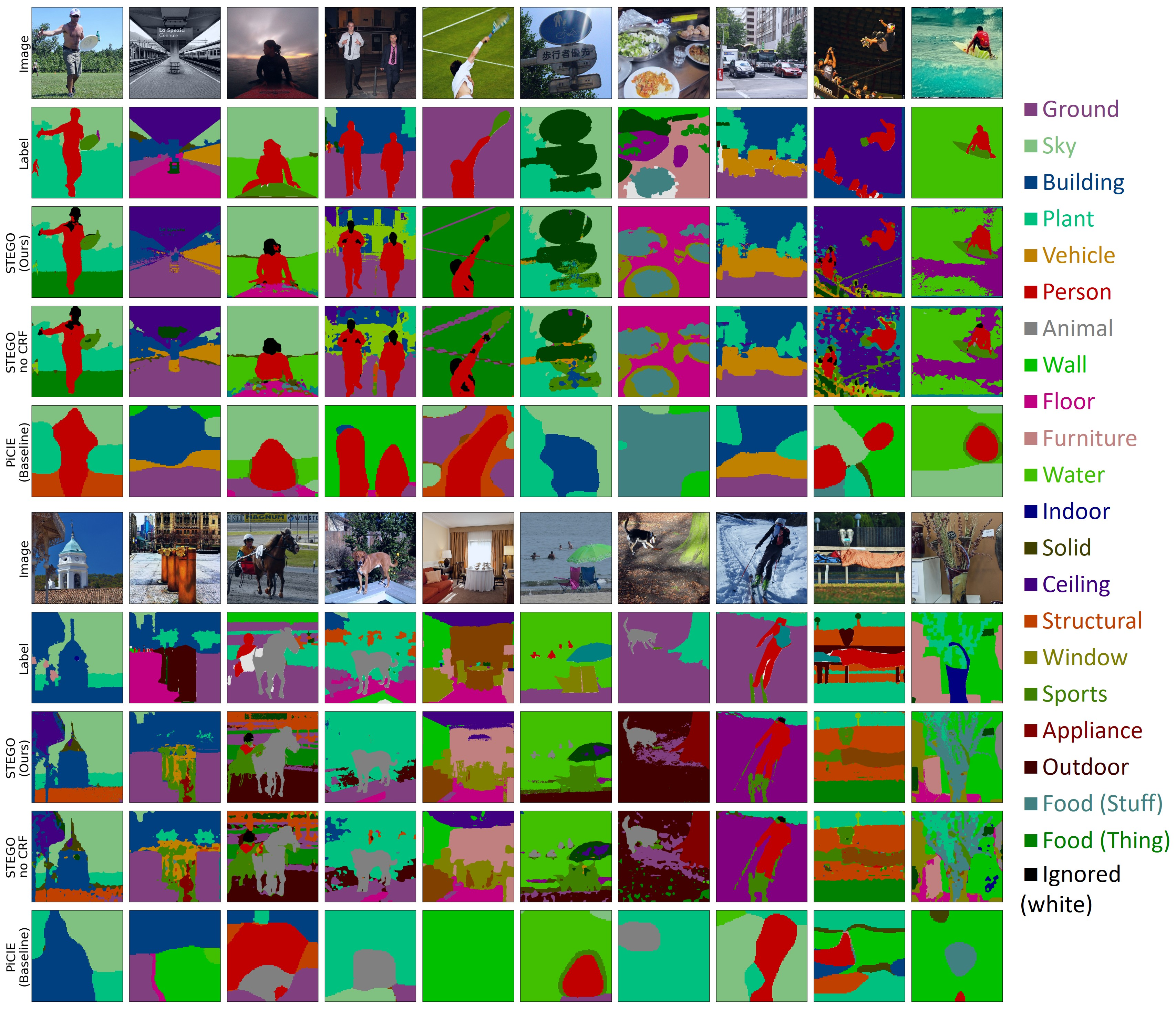
A linear probe or CRF post-processing step sharpens spatial edges. CRF stands for conditional random field, a smoothing technique that refines boundaries by considering whether neighboring pixels likely share a label. K-means clustering over the learned embeddings then produces the final segment map.
Why It Matters
The numbers tell a clear story: STEGO improves over the previous best unsupervised method by +14 mIoU on CocoStuff and +9 mIoU on Cityscapes. mIoU (mean Intersection over Union) measures how accurately predicted segments overlap with the true ones, where 100 is perfect. Both CocoStuff and Cityscapes are large-scale benchmarks with dozens of semantic categories. This is not an incremental improvement. It narrows the gap with fully supervised systems by a wide margin.
The deeper implication is architectural. By decoupling feature learning from label discovery, STEGO becomes modular: as self-supervised feature extractors improve (and they’re improving fast), STEGO can plug in better backbones and inherit the gains for free. That’s a design philosophy, not just a method. The path to powerful unsupervised perception may not require rethinking everything from scratch. It may be enough to organize the semantic knowledge that modern self-supervised models already encode implicitly.
Any domain where annotation is expensive or impossible can use this. Histopathology slides, astronomical survey images, materials science micrographs: these are all areas where a system that organizes visual data without ever being told the categories would be immediately useful.
Bottom Line: Self-supervised features already contain rich semantic structure. STEGO provides a targeted distillation framework that turns those latent correspondences into state-of-the-art segmentation maps, no human labels required.
IAIFI Research Highlights
Transformer architectures originally developed for NLP, combined with self-supervised learning principles, can solve dense spatial reasoning problems relevant to scientific imaging, including astrophysics domains where ground-truth labels are unknown or ill-defined.
STEGO advances unsupervised computer vision with +14 mIoU and +9 mIoU gains over prior state of the art on CocoStuff and Cityscapes, establishing a new paradigm of separating feature learning from cluster compactification.
Unsupervised segmentation tools like STEGO create new possibilities for automated structure discovery in scientific images, from galaxy morphology to particle collision events, where human annotation is prohibitively costly or expert categories are contested.
Future directions include applying STEGO's distillation framework to domain-specific scientific datasets and integrating stronger ViT backbones as the self-supervised learning field advances. See [arXiv:2203.08414](https://arxiv.org/abs/2203.08414).